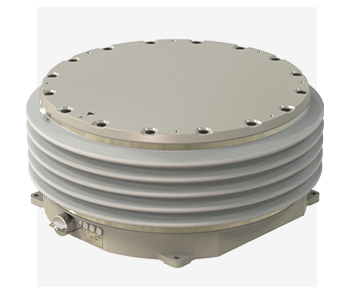
The compact Ruggedized Stabilization Mount 50 targets the acquisition of perfectly stabilized offshore data.

Advantages
- Compact and lightweight design suitable for deployment on USVs and small buoys
- Adaptable to operational requirements upside-down hanging application possible
- Most cost-effective marine Gyro Mount suitable for entry-level users
Better data with cost-effective gyro stabilizer
The RSM 50 is the smallest and most cost-effective of SOMAG’s marine gyro stabilizers. The ruggedized platform compensates roll and pitch motions of boats and ships moving in wavy waters. The two-axis gimbal boasts an innovative round shape, a small form factor and low weight suitable for capturing highly accurate footage even on smaller buoys and on ASVs/ USVs for unmanned missions. High quality materials and a solid mechanical design ensure an effective use of this salt- and splash-water resistant gyro mounting system.
Precisely adaptable to your needs
The electromechanical gyro stabilizer ensures highly accurate data capturing with electro-optical reconnaissance and surveillance camera systems up to 40 kg (88.2 lbs). No matter which payload is combined with the Mount, the result is always the same – the Mount load remains perfectly balanced, even when the ground is moving.
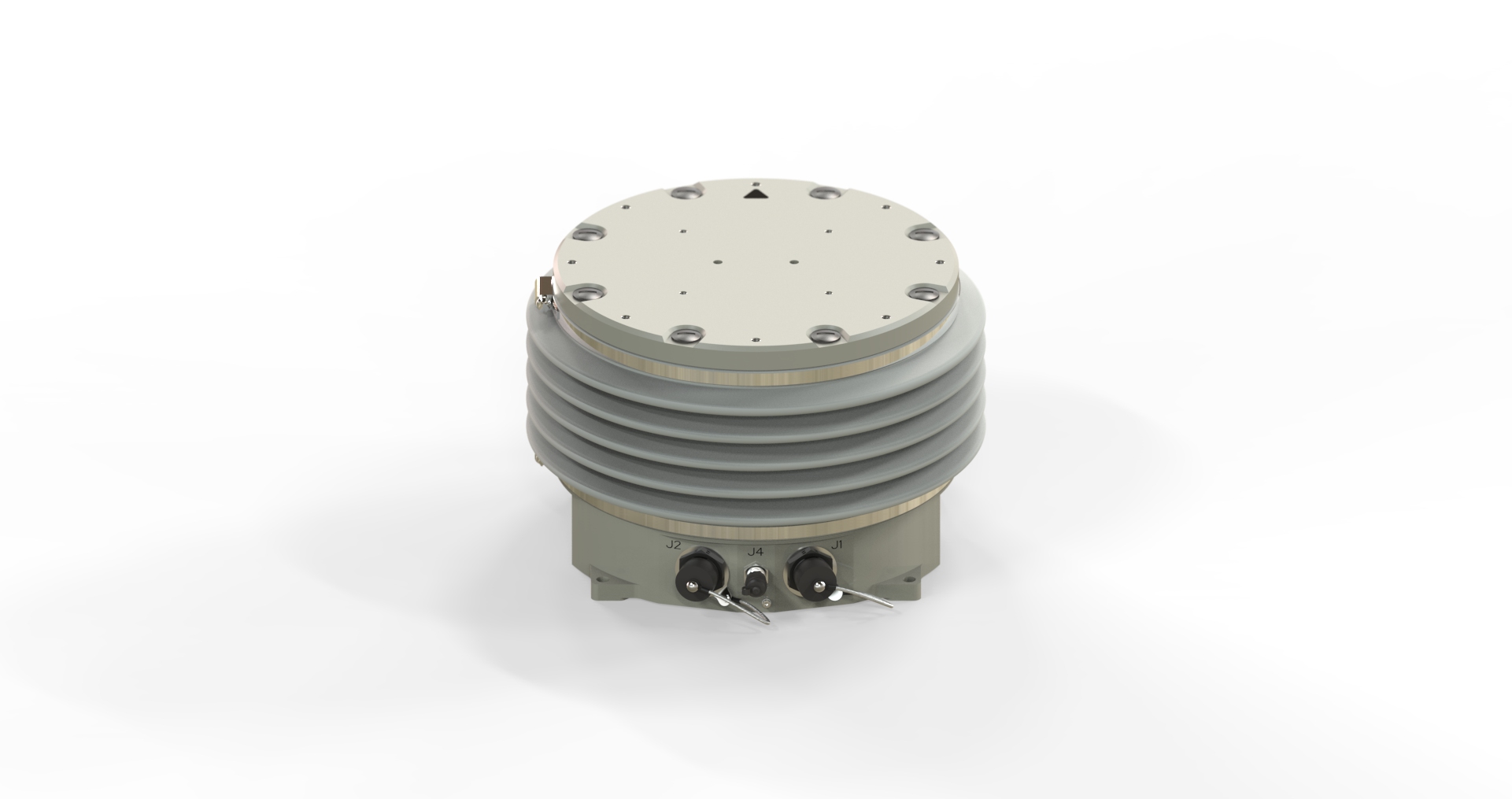
The RSM 50 can be adapted to your specific application requirements, including upside-down hanging installation. In addition, the successor of the RSM 400 now also offers an energy-saving mode for long-term applications as well as a failsafe braking system to securely lock payload during power outage. The new Ethernet communication interface allows for an integration into existing networks as well as a control and monitoring of multiple mounts within a network.
Specifications
| Angular Stabilization Ranges | Pitch at 0° Roll: Roll at 0° Pitch: Yaw (Drift): | ≤± 20.0° ≤± 20.0° no drift correction |
| Residual Deviation1 | ≤0.3° rms | |
| Payload2 | 40 kg | 25 kg | 12.5 kg 88 lbs | 55 lbs | 28 lbs | |
| Continuous Torque | 25 Nm | |
| Dynamic Peak Torque3 | 50 Nm | |
| Mass | 11.5 kg | 24.3 lbs | |
| Dimensions | Height Diameter | 197.5 mm | 7.8 in Ø306 mm | Ø12 in |
| IP Class | IP 67 | |
| Operating Temperature | -32 °C … +55°C | -25.6 °F…+131 °F | |
| Storage Temperature | -55 °C … +85 °C | -67 °F…+185 °F | |
| Communication Interfaces | Ethernet | RS422 | RS232 (optional) | |
| Operational Voltage | 24 VDC (24…30 VDC) | |
| Average Power Consumption4 at Operational Voltage | 50 W | |
| Peak Power Consumption4 at Operational Voltage | 250 W | |
| Applied Standards | IACS E10, DNV GL, 2006/42/EC Machinery |
| Preliminary data, subject to change. The technical specifications in the metric system represent the binding reference values. The imperial units are rounded approximations and are provided for reference only. 1 Vehicle angular motion ≤± 18° / 25°/s / 40°/s2 – small periodical lateral accelerations (≤ 0.5 g) acceptable; constant lateral accelerations for more than 1 minute resulting from vehicle’s turning maneuvers are compensated by internal or external GPS input. No GPS input could reduce the performance of the Mount during turning maneuvers. 2 Possible payload weight depends on lateral acceleration and CoG of payload | shown data is based on 1.0 g lateral acceleration and a CoG payload offset to the Mount surface of: 125 mm (4.9 in) | 200 mm (7.9 in) | 400 mm (15.7 in) 3 Maximum duration 90 s at 55 °C surrounding temperature / longer if temperature inside the unit is < 55 °C 4 Horizontal payload CoG offsets are not considered; without wind force and other possible external forces |
Applications
Sharp images and a stabilized field of view despite high waves and rough weather conditions? The solution is Gyro Stabilization Mounts, developed especially for this purpose. Roll and pitch movements are reliably compensated to keep the sensor system perfectly balanced. Would you like to see in which cases SOMAG Marine Mounts are beneficial? We have compiled a number of examples for you that show the variety of application scenarios for our devices.
RSM 50 – Stability and Responsiveness in Action
Downloads
Discover all Gyro Stabilization Mounts with their specifications at a glance in our new product catalog. Below you will also find Mount-specific documentation. Do you need other documents? Then do not hesitate to contact us. We will gladly send you manuals on request.

Trust Somag

Mount Control App and Software Features
Mount Control App
For all Gyro Stabilization Mounts, SOMAG provides a self-developed Mount Control App with numerous features. It is your all-in-one tool for managing your Mount. The app is part of the standard scope of delivery of each device and is delivered on a USB stick together with the Mount.
Software Features
SOMAG offers optional Software Features which allow you to customize your Mount individually to your mission requirements. Feature management and settings can conveniently be made in the SOMAG Mount Control App. Get the most out of your stabilization platform and learn more about the optional Software Features.